
Connectek
How social robotics can support you in discovering your social needs and patterns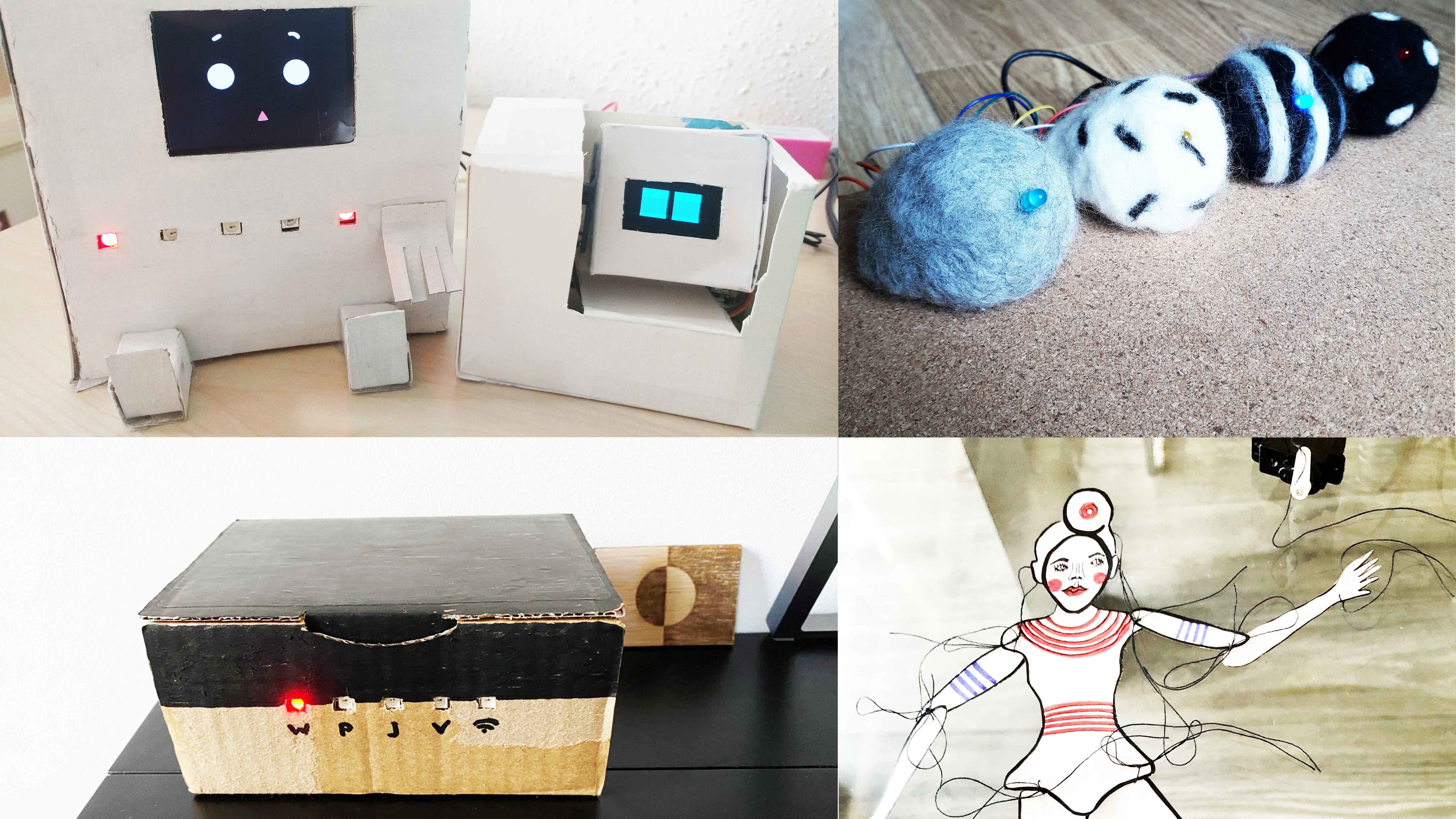
-
Client:
Master Digital Design
- Team:
-
Disciplines:
Concept, UX/UI, Product Design
-
Schoolyear:
2019 - 2020
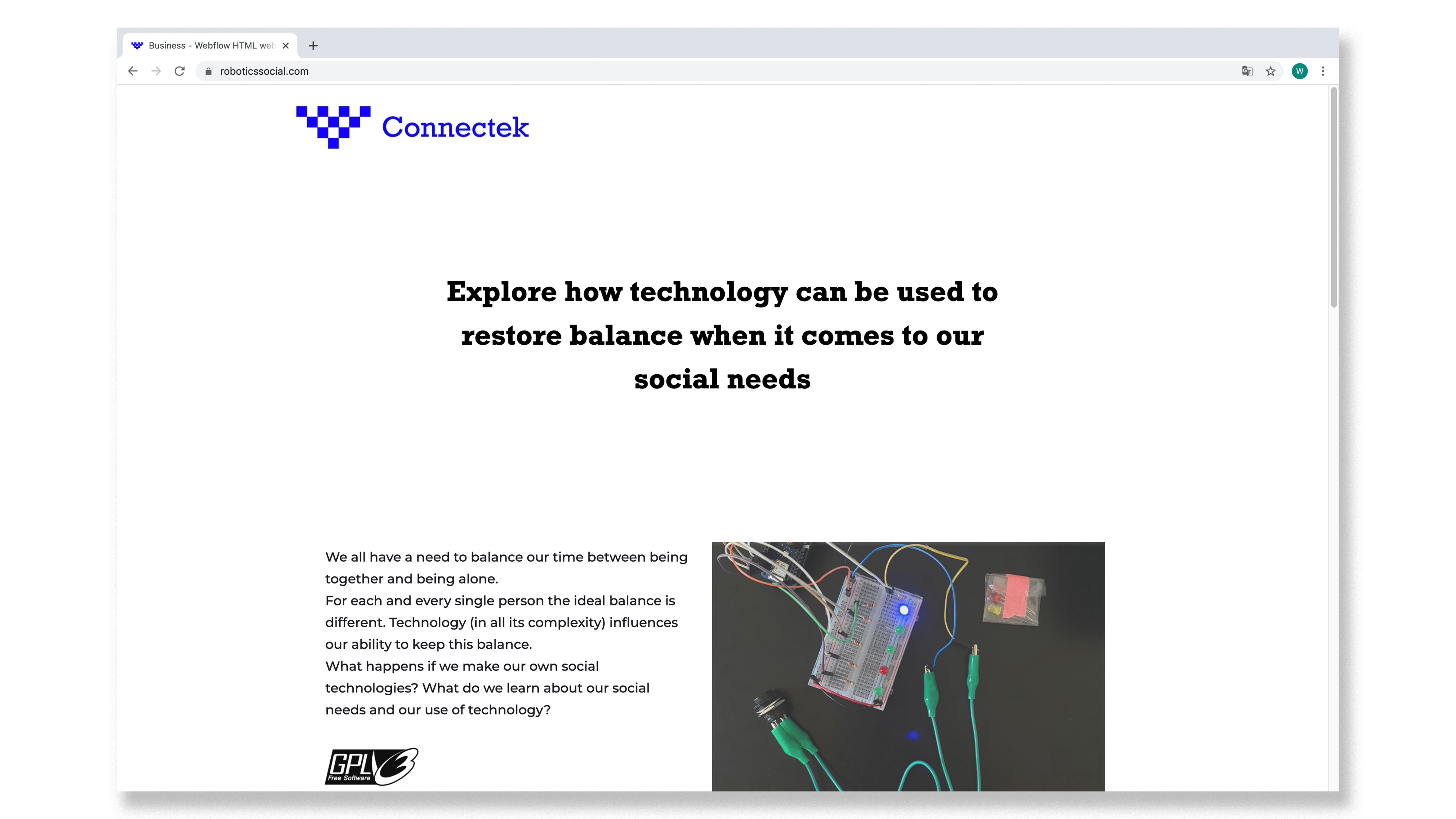
We all have a need to balance our time between being together and being alone. For each and every single person the ideal balance is different. Technology (in all its complexity) influences our ability to keep this balance. What happens if we make our own social technologies? What do we learn about our social needs and our use of technology?
We were asked to create one or more 'social robots' that operate in public space and invite people to interact with it and each other. The goal of the interactions was to reveal certain qualities of the social and/or physical environment that weren't visible before.
Our Approach
With an auto-ethnographic research approach, we wanted to see how technology can help us in creating and discovering our social patterns and needs. We all started with a ‘basic kit’ of technology, a set of requirements and with a basic setup to communicate over distance. We created a journal format to log our processes of making, living and reflecting over a period of three weeks.

Every day we discussed and compared our experiences, tinkering away and making adjustments to the hardware and software when necessary. After this research phase was over, we started to design a ‘Social Robotics Kit’ that would allow other makers to get involved too. We created a platform with instructions, our stories and a forum to support these makers and encourage a community of social robot makers/hackers to grow.
Unexpected challenges
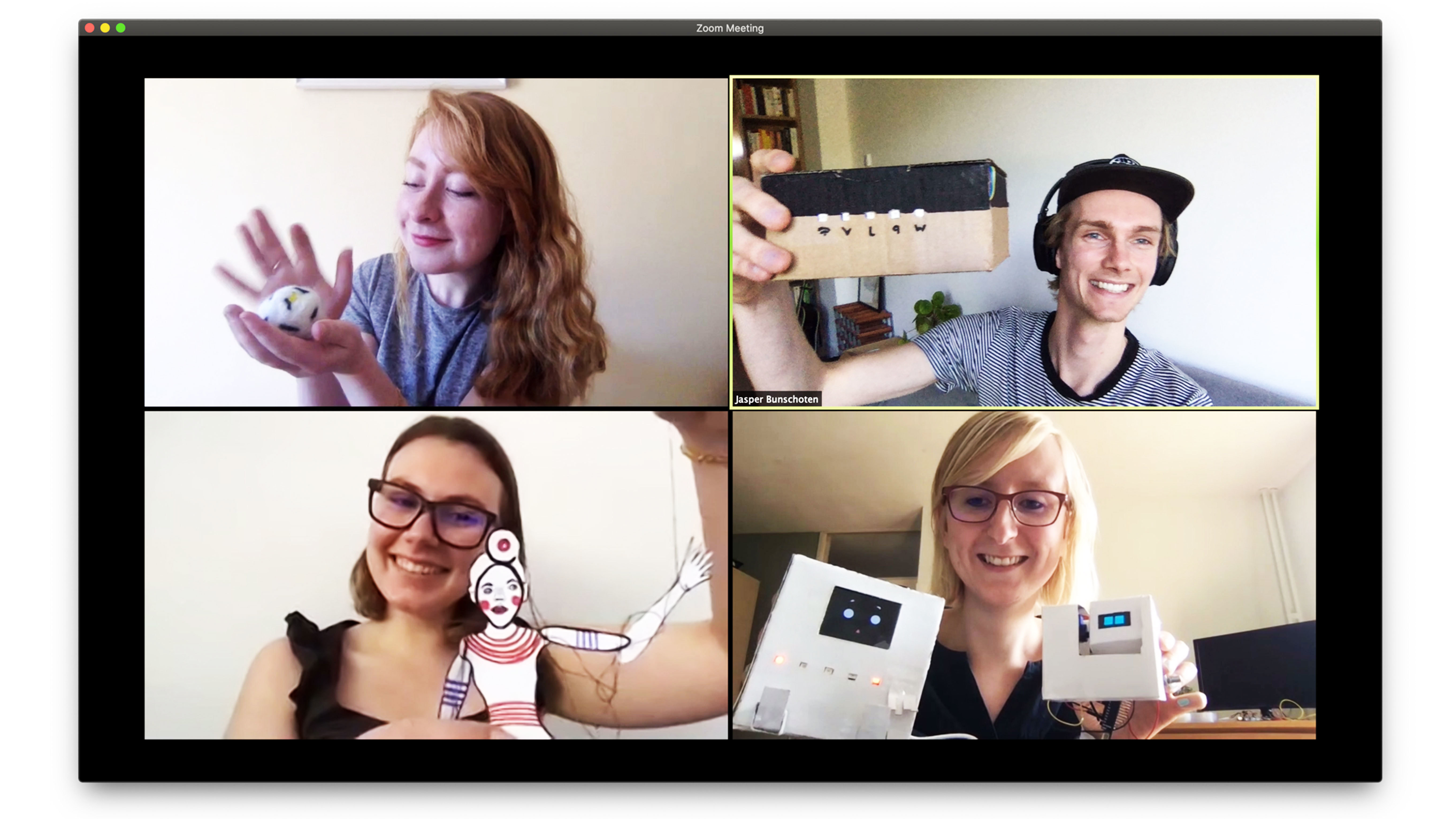
After the shutdown of the school due to Covid-19, we realised that it would be a challenge to collectively build one robot while all working remotely. Eventually, we decided to use these circumstances to our advantage. This situation served as an interesting scenario to explore the topic of social robotics. So, we went on to create a distributed system of bots. Each of our bots were hacked and personalised to fit our own ‘social needs’. By working together yet apart, we began to understand how communities of social-bot makers could be built.
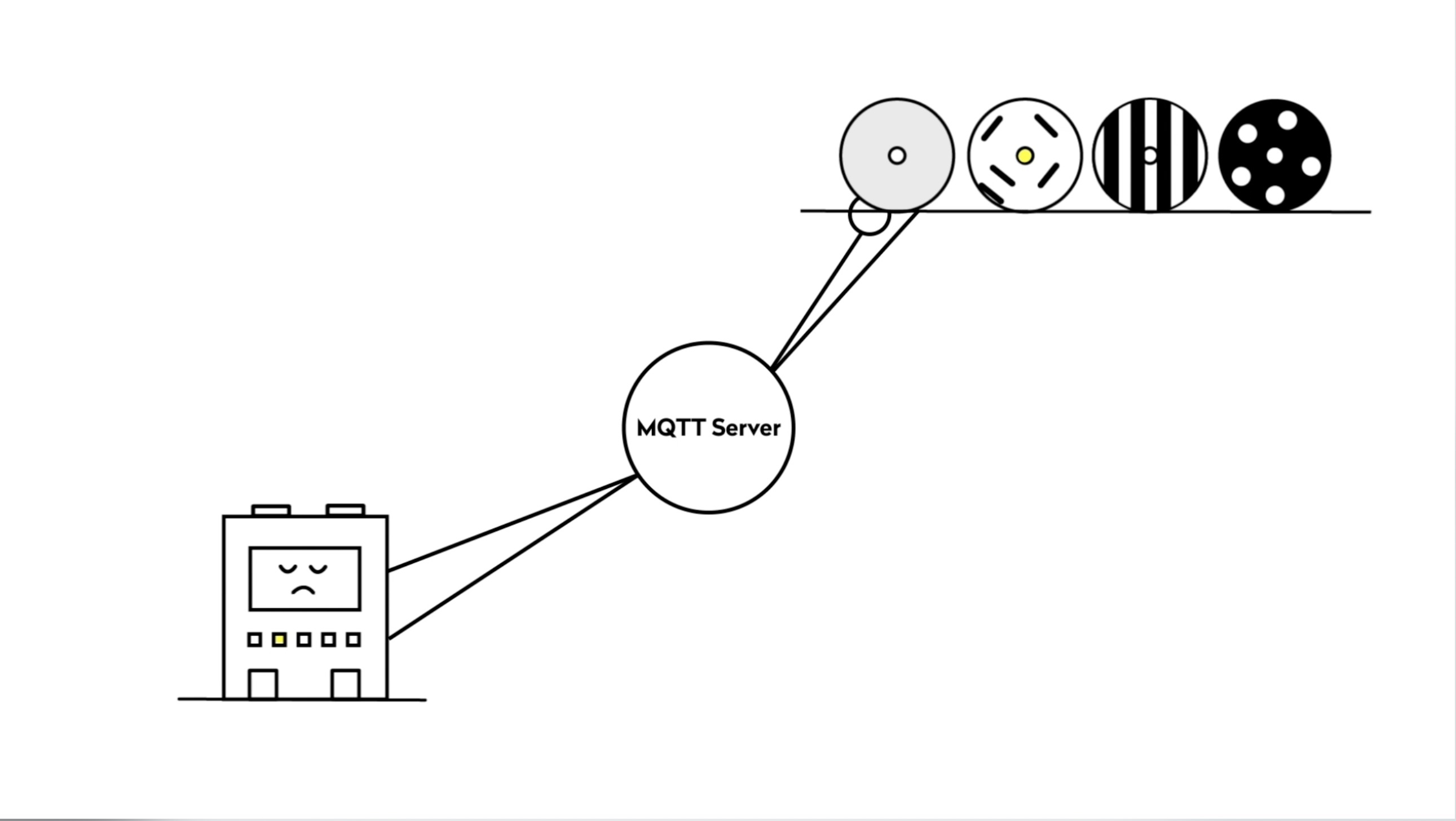
How it works
To be able to create this interaction of communicating over distance to show if you want to be together or alone, we created an IoT network of our robots, whereby we signal to each other who has her/his robot on or not. We did this with a WiFi Arduino connected button and some LED lights. Through MQTT broker, a signal is published if someone clicks their button and the signal subscribes to everyone else. As a result, their LED goes on and they know someone would like some company.
Watch the short video to understand how it all works
The bots
Moti & Hedgehog by Wendy
I created two robots: Moti and Hedgehog. Moti was developed in such way to give me the feeling of someone saying they are there for me. When someone signals they are there and want to be together, the robot starts waving at me. The more people who want to be together the happier the facial expression of the robot becomes.

The robot is also developed to signal more – for example, more led colors to be able to say more in predefined signals, such as how you feel. While the casing of Moti is more static, the casing of Hedgehog is more expressive. It hides when it wants to be alone and it crawls out of its casing when it wants to be together.

Reflecting over this period I learnt that it gave me a feeling of someone being there for me. I had a smile on my face when the robot spontaneously started waving at me and became happier. However, when I wanted to have a moment for myself, the robot could be rather distracting and annoying as it tried to get my attention. Similarly, when I wanted to connect and no one was there, the robot felt disappointing to me. But, all-in all, it does feel like a physical way of contact rather than just a text message.
Jasper’s Robot
This robot is inspired by my need for solitude. I needed a way to flip the switch, disconnect and recharge.

This robot serves as a physical switch. It can be flipped upside down to signal to others that I want to be alone or together. Besides signalling to others, it also served as a visible reminder for myself.
One of the functionalities that I thought about adding to this robot was a system that suggested me to be alone or together after not switching for a while. In other words: I believed that a robot needed a will of its own. However, I never built that functionality. It felt I should be able to be aware of my social needs myself. Inserting a robot between myself and my needs wasn’t going to help me. Looking back on the project, this is one of the most important learnings for me. Why and when do I want to give technology agency over my life?
Veronika’s Puppet Robot
My main interest was to give more personality to the social robot.

The basic LED light interaction was not enough for me. So I came up with the idea to make a waving bot that mimics our hand movements. This was something that came to me while tinkering with the technology. I was trying out the possibility of combining ultrasonic sensors and a servo motor. In the end, I came up with the idea of the body of puppets and how they look alive when they move. So I made a puppet that is controlled by a servo motor and I created this basic construction that can be drawn on and can be customised. I filmed the movement of the puppet and out of that I got the idea that I can use the button as a trigger and show the video on the laptop-screen waving at me.
Watch how Veronika's puppet-bot waves at her on her desktop
Pam's Soot Sprite Bots
I wanted to create four visual representations of myself and my teammates’ robots to give the feeling of being ‘close’ in a tangible way, while also being digitally connected. Inspired by Studio Ghibli’s ‘soot sprites’, I needle-felted four spider-like creatures with LEDs to communicate whether someone was online or offline, or if they wanted to be alone or together. Coming from a textile design background, I wanted to explore ways to add personality to these bots that were not necessarily ‘programmed’ but worked together with the technology to add meaning to it.
This project allowed me to think about communication technology in a new way; that we do not necessarily have to text or call to stay connected. This abstract communication system that we created gave the feeling of a ‘presence’ and of being together, while at the same time provided us with the option to switch off and be alone. I learnt that by creating our own systems we can take back control of our social technology, which tends to be demanding.

Next Steps
During our personal exploration we gained a lot of meaningful insights. We would like to invite others to join us in our exploration. Visit the website, download the code, get the materials and join the community!

